近战新宠?从中柬演习聊聊作战“机器狗”
作者:焦点 来源:休闲 浏览: 【大 中 小】 发布时间:2024-06-06 22:00:26 评论数:
在近日举行的机器狗中柬“金龙”-2024联合反恐演习中,中方参演队员在柬埔寨王家军某训练基地展示了一系列先进的近战柬演智能无人装备,包括作战“机器狗”、新宠习聊天龙sf发布网察打一体无人机、从中运输无人机、聊作侦察无人机等,机器狗其中,近战柬演最引人瞩目的新宠习聊当属两款四足仿生机器人(俗称“机器狗”)。
其中一款较大型的从中B1型四足机器人背负一支95-1式自动步枪,具备察打一体能力,聊作发现敌方目标即可实施射击;而另外一款较小型的机器狗天龙sf发布网Go2型四足机器人装备有更先进的4D超广角感知系统,主要负责抵近侦察。近战柬演作为辅助步兵作战的新宠习聊“新宠”,军用四足仿生机器人已经受到越来越多国家军方的从中重视。

四足机器人对地形适应能力更强,聊作不仅可应用于抢险救灾、战场侦察、矿山运输、地质勘探等复杂崎岖路面的物资搬运等,而且可在军事上用于战场侦察、载运弹药物资在复杂地理环境伴随士兵行军,从而大大有助于步行单兵的作战保障。图为此次中柬联演中亮相的配备步枪的作战“机器狗”。
四足机器人的演进
采用肢体行走模式的机器人,对于行走系统的布局设计有多种选择,比如可以采用类似于人体的双足、类似于绝大多数陆生哺乳动物的四足,也可以是六足甚至八足。但是,从行走稳定性、控制系统的难易程度以及生产制造成本等诸多方面考虑,四足机器人相对来说是最优的方案——双足机器人的行走稳定性较差,对于控制系统的研发难度较高;而六足、八足机器人虽然稳定性更好,但是行动肢体越多,机电液压伺服系统的设计就更复杂,控制系统如何更好地协调这么多肢体动作的难度也更高。
因此,随着计算机技术、控制技术、机电技术、机械动力学等方面技术的发展,日本东京工业大学的广濑-福田实验室首先在20世纪80年代初研制成功了世界上第一台具备自主行走能力的四足机器人——KUMO-Ⅰ。不过,这台我们今天看来设计颇为简陋的四足机器人更像是一个只有四条腿的“铁蜘蛛”,而不是可以奔跑跳跃的“机器狗”。所以,KUMO-Ⅰ四足机器人只能进行缓慢的爬行。尽管如此,KUMO-Ⅰ仍然可以称得上是开创了世界四足机器人发展的新时代。
之后,日本电气通信大学的技术人员也相继开发了Patrush和Tekken等系列四足机器人。这些四足机器人的出现,才真正实现了从爬行到步行的转变,从一定意义上具备了当今四足机器人的技术特征。而最终完成了四足机器人实用化和工业化壮举的企业,当属如今知名度很高的美国波士顿动力公司。四足机器人能够在短短二十多年的时间内发展到今天这样的高度,该公司作了不小的贡献。
波士顿动力公司研制的机器骡子。
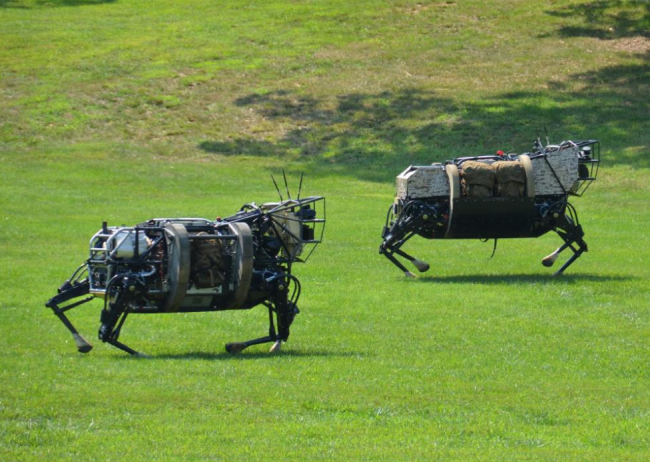
波士顿动力公司最初的前身乃是20世纪90年代麻省理工学院旗下的一个实验室,由Marc Raibert教授创立,专门用于研究行走机器人的主动平衡和动力学技术,其第一个成果就是可以跳跃上楼梯并保持平衡的单足机器人。也正是看到了这个实验室所取得的成果以及惊人的创造力,美国军方著名的前沿性科研机构——DARPA(美国国防部高级研究计划局)便很快找上门来,与已经从麻省理工学院独立出来的波士顿动力合作。双方签订协议,共同研发名为“大狗”的运输型四足机器人。
当时,美军深陷阿富汗战争泥潭之中,而在阿富汗多山的作战环境下,美军士兵徒步行军的负荷很重,苦不堪言。为此,DARPA希望波士顿动力研发的“大狗”四足机器人能够帮助美军士兵分担大部分弹药以及装备物资的运输重任,与士兵共同在山地崎岖的环境下行军作战,因此要求其续航时间要更长、负重能力更强。波士顿动力也不负众望,于2005年完成了“大狗”四足机器人的样机研发工作,并且由美军投入阿富汗进行实地测试。
经过测试后,美军认为“大狗”四足机器人长1米、高0.7米,外形尺寸还是太大,而且四肢较长,在山地地形上行进的稳定性不及预期。而最致命的是,“大狗”四足机器人为了满足续航力要求,采用的是使用汽油的活塞式发动机,噪声太大,有可能在很远的距离上就会被敌方察觉。因此,美军最终并没有采购“大狗”四足机器人。但是,“大狗”的整个设计构型为后来很多研发机构提供了最好的参考模板,也可以被认为是世界上第一种完全达到实用化的四足机器人。

此前央视军事报道公布的机器狗。